Lorentz Transformation in hindi equations लोरेंत्ज़ परिवर्तन समीकरण क्या है , लॉरेन्ज रूपान्तरण किसे कहते हैं
यहाँ जान पाएंगे कि Lorentz Transformation in hindi equations लोरेंत्ज़ परिवर्तन समीकरण क्या है , लॉरेन्ज रूपान्तरण किसे कहते हैं ?
लॉरेंज रूपांतरण (LORENTZ TRANSFORMATION )
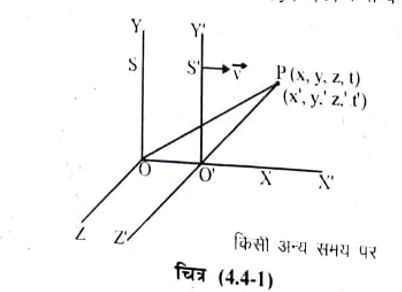
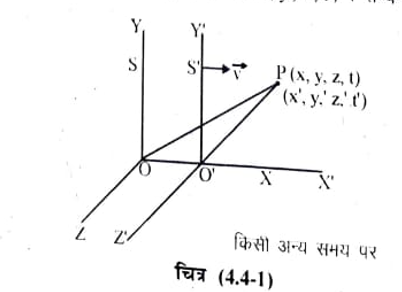
माना दो जड़त्वीय निर्देश तंत्र S तथा S’ के लाम्बिक निर्देशांक अक्ष क्रमश: X, Y, Z तथा X’, Y’, Z’ है जो परस्पर समानांतर है जैसा कि चित्र (4.4-1) में दर्शाया गया है। निर्देश तंत्र S’ नियत वेग से तंत्र S के सापेक्ष +x दिशा में इस प्रकार गति कर रहा है कि दोनों तंत्रों के Y तथा Z अक्ष परस्पर समांतर रहे। दोनों निर्दश तंत्रों के मूल बिन्दुओं क्रमश: O तथा O’ पर स्थित प्रेक्षकों के लिये 1 व ‘किसी घटना के प्रेक्षित समय है। सुविधा की दृष्टि से हम मानते हैं कि जब दोनों प्रेक्षकों की घड़ियाँ शून्य समय बताती है अर्थात् = 1′ = 0 पर दोनों तंत्रों के मूल बिन्दु 0 तथा O’ सम्पाती होते हैं। मान लीजिये किसी बिन्दु P के निर्देशांक निर्देश तंत्र S तथा S’ में क्रमश: (x, y, z ) तथा (x’, y’, z’) है। लॉरेंज रूपांतरण से (x, y, z, t) तथा (x, y, z’, 1′ ) में सम्बन्ध स्थापित करते हैं।
अब कल्पना करते हैं कि t= t = 0 पर मूल बिन्दु 0 तथा O’ से जो इस क्षण सम्पाती है एक क्षण- दीप्ति (flash) उत्सर्जित होती है जिससे आकाश में बिन्दु 0 के चारों ओर एक गोलाकार तरंगाग्र (spherical wave front) वेग c से फैलता है। आपेक्षिकता के सिद्धान्त के प्रथम अभिगृहीत के तंत्र S’ के सापेक्ष भी यह दीप्ति O’ के चारों ओर एक गोलाकार तरंगाग्र के रूप में प्रगति करता हुआ प्रतीत होगा जैसा कि चित्र (4.4-2) में दर्शाया गया है।
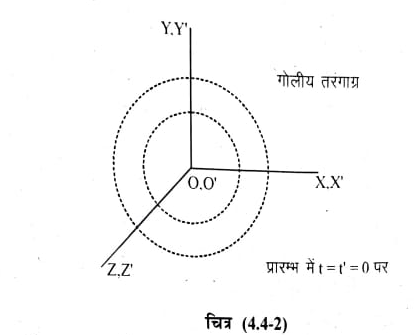
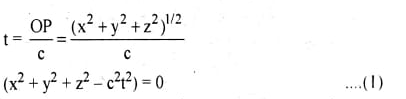
यदि प्रेक्षक O द्वारा गोलीय तरंगाग्र को किसी बिन्दु P जिसके स्थिति निर्देशांक S तंत्र में (x, y, z) है, पर पहुँचने में लगा समय 1 नापा जाता है तो
इसी प्रकार यदि प्रेक्षक O’ द्वारा गोलीय तरंगाग्र को उसी बिन्दु P जिसके स्थिति निर्देशांक S तंत्र में (x’, y’, z’) है, पर पहुँचने में लगा समय ‘ नापा जाता है तो
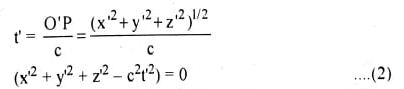
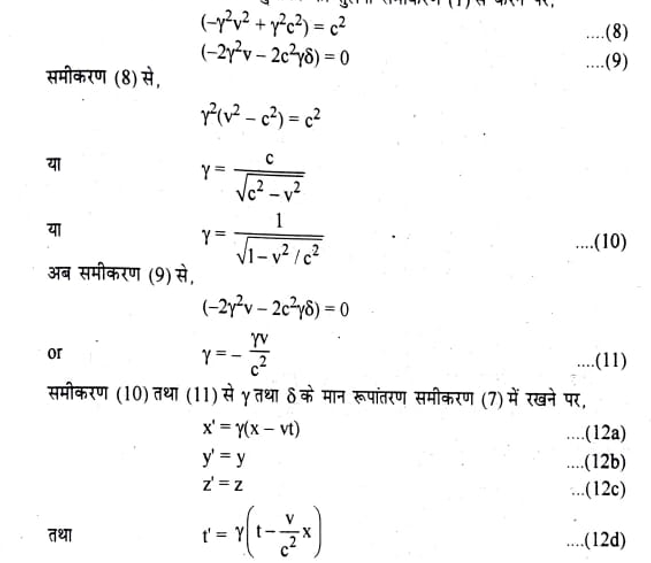
चूँकि समीकरण (1) तथा (2) एक ही बिन्दु P के लिये वैध है इसीलिये समीकरण ( 1 ) तथा (2) का परस्पर रूपांतरण एक निर्देश तंत्र से दूसर तंत्र में हो जाना चाहिये। अतः सभी जाड़त्वीय निर्दश तंत्रों में (x2 + y2 + Z2-c2-t2) का मान अचर होना चाहिय अर्थात् एक ही घटना ( event ) के लिये S तंत्र में निर्देशांक (x, y, z, t) तथा S’ तंत्र में निर्देशांक (x, y, z’, ‘) मं रूपांतरण इस प्रकार हाने चाहिये कि समीकरण (1) तथा (2) सदैव वैध रहें तथा रूपांतरण समीकरण विमीय रूप से समान रहे। अतः रूपांतरण समीकरण आकाशीय निर्देशांक के साथ-साथ समय निर्देशांक में रैखिक .. (linear) होने चाहिये अर्थात् S तंत्र में एकल घटना के संगत S’ तंत्र में भी एकल घटना होनी चाहिये।
इसीलिये मान लीजिये कि समान घटना के लिये रैखिक रूपांतरण समीकरण निम्न है-

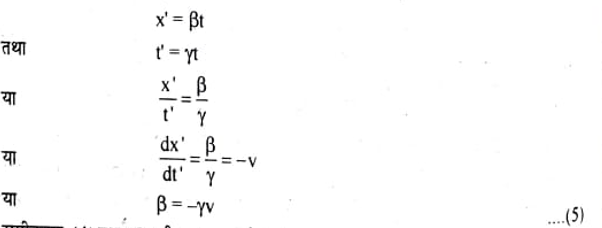
(चूँकि तंत्र S’ के अक्ष X ‘गति तंत्र S के अक्ष X की दिशा में है अतः y व z निर्देशांक अपरिवर्तित रहेंगे अर्थात् y’ =y व z’ = z)
यहाँ c, B, y तथा 8 नियतांक है जिनका मान ज्ञात करना है ।
(i) चूँकि हम जानते है कि निर्देश तंत्र S के सापेक्ष प्रेक्षक O’ (जिसके लिये निर्देश तंत्र S में x’ = 0) +X-दिशा में v वेग से गति कर रहा है अतः x = 0 पर स्थित प्रेक्षक O’ का निर्देश तंत्र S के सापेक्ष वग x = 0 पर dx/dt = v
अब समीकरण (3a) से.
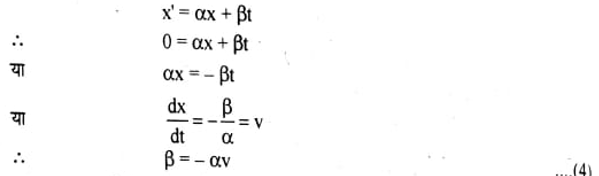
(ii) इस प्रकार निर्दश तंत्र S’ के सापेक्ष प्रेक्षक O (जिसके लिये निर्देश तंत्र S में x = 0) – x अक्ष के अनुदिश – v वेग से गति करता हुआ दिखाई देता है। इसलिये प्रेक्षक O का निर्देश तंत्र S’ dx’ के सापेक्ष वेग x = 0 पर dx/dt = – v
समीकरण (4) तथा (5) की तुलना करने पर,
A = y ……………(6)
(iii) समीकरण ( 5 ) तथा (6) को समीकरण (3) में रखने पर,
x’ = y (x – vt) ….(7a)
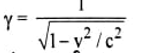
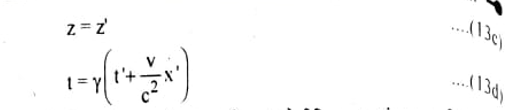
ये समीकरणें लॉरेंज रूपांतरण समीकरण कहलाती है। आपेक्षिता के विशिष्ट सिद्धान्त के अनुसार निर्देश तंत्र S’ के सापेक्ष निर्देश तंत्र S नियत वेग – V से गति करता हुआ माना जा सकता है। अतः प्रतिलोम लॉरेंज रूपांतरण v और v से प्रतिस्थापित करके ज्ञात कर सकते हैं।
अतः निर्देश तंत्र S’ के सापेक्ष S तंत्र में रूपांतरण समीकरण होंगे-

यह देखा जा सकता है कि लॉरेंज रूपांतरण समीकरण गेलीलियन रूपांतरण समीकरणों में परिवर्तित किया जा सकता है यदि प्रकाश के वेग को अनंत मान लिया जाय ।
लॉरेंज रूपांतरण समीकरणों के परिणामों को समझने के लिये हम एक घटना ( event) को परिभाषित करते है जो किसी समय पर (x, y, t) निर्देशांक वाले स्थान पर घट रही है। इस प्रकार (x,y,z,t) निर्देशांक वाले बिन्दु को घटना कहते हैं। यदि हम किन्हीं दो घटनाओं पर विचार करें जिनके निर्देशांक (x1. Y1, Z1, t1 ) तथा ( x2, Y2 Z2, t2) हैं तो दोनां घटनाऐं समक्षणिका (simultaneous) कहलाएंगी जब t = t2 – t1 = 0 होगा और दोनों घटनाएँ समक्षणिक तथा समस्थानिक हैं तो वे द घटनाऐं सम्पाती (coincident) कहलाती है। लॉरेंज रूपांतरण से यह प्रकट होता है कि यदि घटनायें एक जड़त्वीय निर्देश तंत्र में समस्थानिक है तो यह आवश्यक नहीं है कि वे दूसरे जड़त्वीय निर्देश तंत्र में समस्थानिक होंगी। इसे सम-संस्थिति की आपेक्षिकता (Relativity of Co-locality) कहते हैं और यदि दो घटनायें एक जड़त्वीय निर्देश तंत्र में समक्षणिक है तो यह आवश्यक नहीं है। कि वे दूसरे जड़त्वीय निर्देश तंत्र में समक्षणिक होंगी। इसे समक्षणिकता की आपेक्षिकता (Relativity of Simultaneity) कहते हैं। किन्तु यदि घटनाएं एक जड़त्वीय निर्देश तंत्र में सम्पन है तो वे सभी जड़त्वीय निर्देश तंत्रों में सम्पाती रहेंगी। ये परिणाम लॉरेंज रूपांतरण समीकरणों से ज्ञान किये जा सकते है।
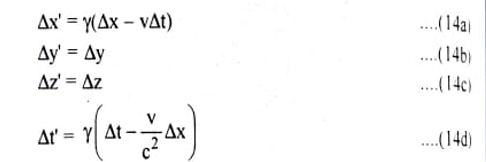
स्पष्टतः निर्देश तंत्र S में समस्थानिक घटनाओं के लिये x = y = z = 0 होता है परन्तु t ≠ 0 इसीलिये दूसरे निर्देश तंत्र में x’ शून्य नहीं होगा अर्थात् निर्देश तंत्र S’ में घटनाएँ समस्थानिक नहीं होगी। इसी प्रकार निर्देश तंत्र S में समक्षणिक घटनाओं के लिये t = 0 होता है । परन्तु x , y, t ≠ 0 इसीलिये दूसरे निर्देश तंत्र मं t शून्य नहीं होगा अर्थात् निर्देश तंत्र S’ में घटनाएँ समक्षणिक नहीं होगी। निर्देश तंत्र S में सम्पाती घटनाओं के लिये x = y = z = t=0 होता है अत: दूसरे निर्देश तंत्र S’ में x’ = y’ = z’ = t = 0 होगा अर्थात् वे घटनायें सम्पाती होंगी।
हिंदी माध्यम नोट्स
Class 6
Hindi social science science maths English
Class 7
Hindi social science science maths English
Class 8
Hindi social science science maths English
Class 9
Hindi social science science Maths English
Class 10
Hindi Social science science Maths English
Class 11
Hindi sociology physics physical education maths english economics geography History
chemistry business studies biology accountancy political science
Class 12
Hindi physics physical education maths english economics
chemistry business studies biology accountancy Political science History sociology
English medium Notes
Class 6
Hindi social science science maths English
Class 7
Hindi social science science maths English
Class 8
Hindi social science science maths English
Class 9
Hindi social science science Maths English
Class 10
Hindi Social science science Maths English
Class 11
Hindi physics physical education maths entrepreneurship english economics
chemistry business studies biology accountancy
Class 12
Hindi physics physical education maths entrepreneurship english economics