लम्बाई में संकुचन , लॉरेन्ज-फिट्जेरल्ड संकुचन Length Contraction, Lorentz- Fitzgerald Contraction in hindi
यहाँ हम विस्तार से पढेंगे कि लम्बाई में संकुचन , लॉरेन्ज-फिट्जेरल्ड संकुचन क्या है Length Contraction, Lorentz- Fitzgerald Contraction in hindi किसे कहते हैं ?
लॉरेन्ज रूपांतरण के कुछ महत्वपूर्ण परिणाम (SOME IMPORTANT CONSEQUENCES OF LORENTZ TRANSFORMATION)
(i) वेगों का संयोजन (Addition of Velocities)
लोरेंज रूपांतरण द्वारा एक निर्देश तंत्र के सापेक्ष नियत वेग से गतिशील दूसरे निर्देश तंत्र में किसी कण या पिण्ड के वेग के रूपांतरण समीकरणों को ज्ञात किया जा सकता है।
माना एक निर्देश तंत्र (frame of reference) 5 में किसी कण का वेग है। इसके घटक होंगे-
किसी अन्य निर्देश तंत्र S’ में, जो प्रारम्भ में निर्देश तंत्र S के साथ सम्पाती था तथा जो निर्देश तंत्र S के सापेक्ष नियत वेग v से +x अक्ष के अनुदिश गति कर रहा है, लॉरेंज रूपांतरण से किसी क्षण’ पर कण के निर्देशांक होंगे-
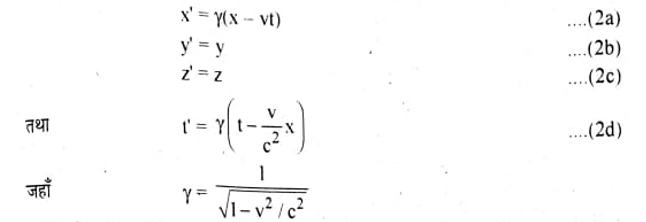
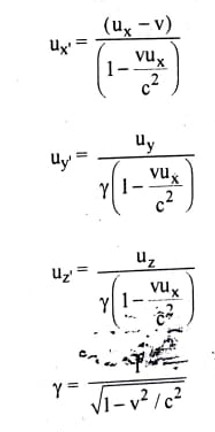
यदि निर्देश तंत्र S’ के सापेक्ष इस कण का वेग u’ हो तो इसके घटक होंगे-

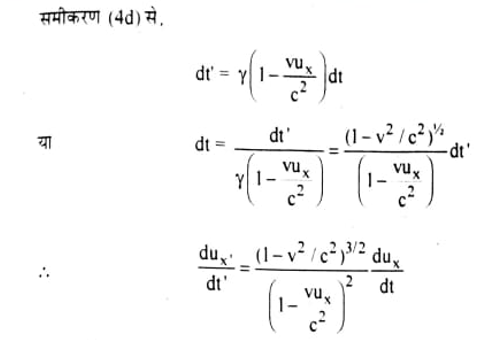
समीकरण (2) का अवकलन करने पर,
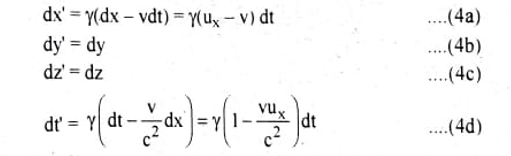
समीकरण (4a) तथा (4d) में dx = ux dt रख कर तथा समीकरण (4a), (4b) व (4c) को समीकरण (4d) से भाग देने पर,
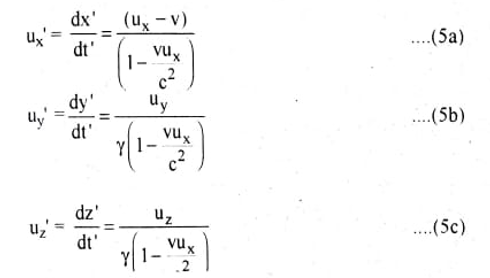
उपरोक्त समीकरणों (5) का समुच्चय (set) वेगों का लॉरेंज रूपांतरण या वेगों के संयोजन का आपेक्षिकीय नियम कहलाता है। निर्देश तंत्र S’ की गति की दिशा वाला वेग घटक uy इन सव समीकरणों में निहित है। अतः यह निर्देश तंत्र S’ में प्रत्येक घटक को प्रभावित करेगा।
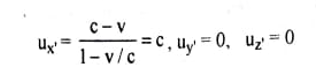
विशिष्ट स्थितियाँ (Special cases) : (a) यदि एक कण निर्देश तंत्र S में +x दिशा में प्रकाश के वेग से गति कर रहा है अर्थात् समीकरण (5a) से,
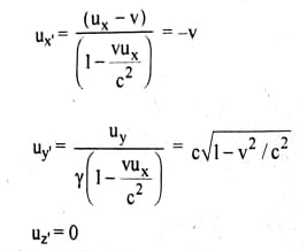
अतः यह कण दूसरे नियत वेग से गतिशील निर्देश तंत्र S’ में भी प्रकाश के वेग से ही, दिशा में गति करता है अर्थात् प्रकाश के वेग से गतिशील कण सभी जड़त्वीय निर्देश तंत्र में प्रकाश के वेग से ही करते हुये प्रेक्षित होंगे। दूसरे शब्दों में, तंत्रों की गति का प्रकाश के वेग पर कोई प्रभाव नहीं पड़ता है। (b) यदि v वेग से गतिशील निर्देश तंत्र S’ में एक कण में वेग से गति कर रहा है व वेग घटक u’x, uy’, वuz हैं तो स्थिर निर्देश तंत्र S में, जो निर्देश तंत्र S’ के सापेक्ष – v वेग से गतिशील माना जा सकता है, प्रेक्षित वेग के घटक होंगे।

इस समीकरण से स्पष्ट है कि यदि v< c तथा u★ <c हो तो दायें पक्ष की राशि धनात्मक रहेगी। अतः ux < c होता है अर्थात् कोई भी दो वेगों, जिनके मान प्रकाश के वेग से कम है का संयोजन प्रकाश के वेग के तुल्य नहीं हो सकता हैं। दूसरे शब्दों में, हम कह सकते हैं कि कण की सापेक्ष गति के वेग का मान सदैव प्रकाश के वेग से कम रहेगा। सीमांत स्थिति में यह प्रकाश के वेग के बराबर होता है।
(c) वेगों के संयोजन का अनापेक्षिकीय (Non-relativistic) सूत्र : यदि v तथा प्रका के वेग की तुलना में अत्यल्प हों तो इस स्थिति में (1-v2/c2)-/- तथा ( 1- uv/c2) के मान लगभग एक के बराबर होंगे। अतः
Ux’ = ux – V, uy’ = Uy, Uz’ = Uz
अर्थात् इस अवस्था में लॉरेन्ज रूपांतरण गैलीलियन रूपांतरण की भांति होंगे।
(d) आइंसटीन का वेग संयोजन प्रमेय प्रकाश के वेग स्थिरता के सिद्धान्त के अनुरूप होता है – इसको सिद्ध करने के लिये माना एक फोटोन निर्देश तंत्र S में + X दिशा में वेग c से गति कर रहा है तो ux = c, uy = 0 and uz = 0 आइंसटीन का वेग संयोजन प्रमेय से,
निर्देश तंत्र S’ फोटोन का वेग = c
यदि एक फॉटान निर्दश तंत्र S में +Y दिशा में वेग से गति कर रहा है तो uy = c तथा uz = 0.
निर्देश तंत्र S’ में फोटोन के प्रेक्षित वेग घटक
निर्देश तंत्र S’ में फोटोन के प्रेक्षित वेग,

इसी प्रकार यदि फोटोन निर्देश तंत्र S में +Z दिशा में c वेग से गति कर रहा है तो निर्देश तंत्र S’ में भी इसका वेग c ही होगा।अतः प्रकाश का वेग किसी भी जड़त्वीय निर्देश तंत्र पर निर्भर नहीं करता है अर्थात् यह सर्वाधिक नियतांक होता है।
(ii) त्वरण का रूपांतरण (Transformations of Acceleration)
समीकरण (5a) को t के सापेक्ष अवकलन करने पर, ‘
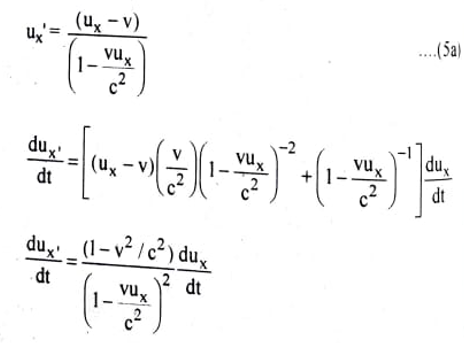
अतः निर्देश तंत्र S के सापेक्ष नियत वेग से गतिशील निर्देश तंत्र S’ में त्वरण
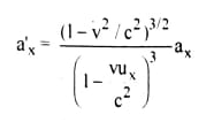
जहाँ निर्देश तंत्र S में कण का त्वरण ax हैं।
इसी प्रकार त्वरण के y तथा z घटक ज्ञात किये जा सकते हैं।
इस समीकरण से स्पष्ट है कि दोनों निर्देश तंत्र में एक ही कण के भिन्न- भिनन त्वरण होते हैं। परन्तु जड़त्वीय निर्देश तंत्रों के लिये गैलीलियन रूपांतरण द्वारा ज्ञात होता है कि सभी जड़त्वीय निर्देश तन्त्रों में त्वरण का मान निश्चर रहता है। दूसरे शब्दों में हम कह सकते हैं कि नियत वेगों से गतिशील तंत्रों में प्रकाश के वेग की निश्चरता गैलीलियन के त्वरण निश्चरता के नियम की वैधता को भंग कर देती है।
(iii) लम्बाई में संकुचन या लोरेंज-फिट्जेरल्ड संकुचन (Length Contraction or Lorentz-Fitzgerald Contraction)
आपेक्षिकता के विशिष्ट सिद्धान्त के महत्वपूर्ण परिणामों में से एक गतिशील पिण्ड की गति की दिशा में लम्बाई में संकुचन है जब उसे किसी स्थिर निर्देश तंत्र के सापेक्ष देखा जाता है। इस प्रकार के संकुचन की कल्पना लारेंज और फिट्जेरल्ड ने माइकल्सन मोरले के प्रयोग के नकारात्मक परिणाम की व्याख्या के लिये की थी। लम्बाई के उचित मापन के लिये आवश्यक है कि पिण्ड के दोनों सिरों की स्थितियों का मापन समकालिक हो परन्तु आपेक्षिकता के सिद्धान्त के अनुसार दो घट्नायें जो एक निर्देश तंत्र में समकालिक होती है. उनका दूसरे जड़त्वीय निर्देश तंत्र में समकालिक होना आवश्यक नहीं होता है । मान लीजिये X- अक्ष के अनुदिश रखी हुई एक छड़ जड़त्वीय निर्देश तन्त्र S के सापेक्ष वेग से X- दिशा में गतिशील है यदि X- दिशा में v वेग से गतिशील एक अन्य जड़त्वीय निर्देश तंत्र S’ की कल्पना करें तो इस निर्देश तंत्र में छड़ स्थिर अवस्था में प्रेक्षित होगी तथा इसके सिरों की स्थिति का मापन समय पर निर्भर नहीं होगा। अतः S’ में मापित लम्बाई सदैव समान प्राप्त होगी। निर्देश तंव S’ जिसमें छड़ स्थिर प्रेक्षित होती है, छड़ के लिये उपयुक्त निर्देश तंत्र (Proper frame) कहलाता है व इसमें मापित लम्बाई L0 उपयुक्त या उचित लम्बाई (Proper length) कहलाती है।
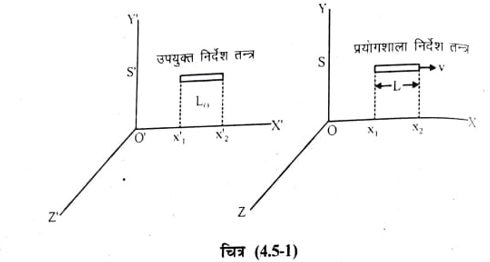
मान लीजिये निर्देश तंत्र S में, जिसके सापेक्ष छड़ गतिशील है एक ही समय पर छड़ के सिर की मापित स्थितियों x2 तथा x1 है जिससे निर्देश तंत्र S में प्रेक्षित लम्बाई
L = x2 – X1 t2 = ty =t पर
उपयुक्त निर्देश तंत्र S’ में, यदि छड़ के दोनों सिरों की स्थितियों x2 तथा x1′ है तो छड़ क उपयुक्त लम्बाई
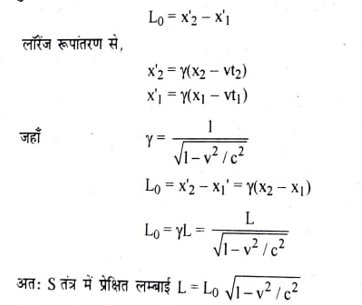
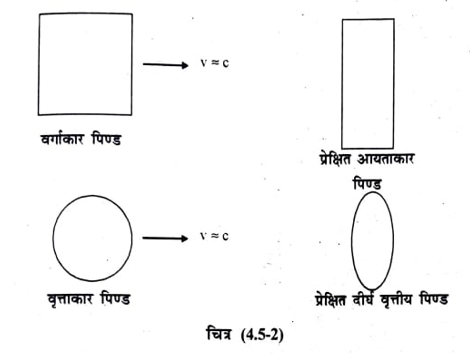
अर्थात् किसी निर्देश तंत्र S में जिसमें छड़ v वेग से गतिशील है, गति की दिशा में मापित लम्बाई उपयुक्त लम्बाई Lo के सापेक्ष संकुचित प्रतीत होगी। अतः गति की दिशा में पिण्ड लम्बाई में संकुचन लॉरेंज-फिट्गजेरल्ड संकुचन कहलाता है। यदि पिण्ड की लम्बाई का मापन गति की दिशा के लम्बवत् किया जाय तो कोई संकुचन प्रेक्षित नहीं होगा। इस प्रकार एक वर्ग की भुजा गति की दिशा में छोटी प्रेक्षित होगी तथा वह आयताकार प्रेक्षित होगा व एक वृतदीर्घ वृत के रूप में प्रेक्षित होगा।
काल – वृद्धि का तात्पर्य है उचित समयांतराल में वृद्धि होना। लॉरेंज रूपांतरणों का एक ओर महत्वपूर्ण परिणाम समयान्तराल की काल – वृद्धि है। जिससे यह निष्कर्ष प्राप्त होता है कि निरपेक्ष समय जिसका मान सब प्रेक्षकों के लिये समान हो, कोई अस्तित्व नहीं है। समय का मापन आपेक्षिक होता है और यह निर्देश तंत्र पर निर्भर करता है।
मान लीजिये किसी निर्देश तंत्र S’ में एक ही नियत स्थिति पर दो घटनाओं (जैसे घड़ी की टिक-टिक) के मध्य समयांतराल to है। यह निर्देश तंत्र S’ जिसमें ये दोनों घटनाऐं समसस्थिति (colocal) पर है, इन घटनाओं अथवा घड़ी के लिये उपयुक्त (Proper ) निर्देश तंत्र कहलायेगा । यदि इन घटनाओं का प्रेक्षण किसी अन्य निर्देशतंत्र S ( प्रयोगशाला निर्देश तंत्र) में लें जिसमें वह घडी या घटना- स्थिति v वेग से -x दिशा में गतिशील प्रेक्षित हो तो इस निर्देश तंत्र में दोनों घटनाओं की स्थितियों सन – संस्थिति प्रेक्षित नहीं होगी।
मान लीजिये उपयुक्त निर्देश तंत्र S’ में दो घटनायें (घड़ी की टिक-टिक ) x1 स्थिति पर t’1 समय पर प्रेक्षित होती है। अतः उचित समयांतराल
ये घटनायें निर्देश तंत्र S में, जिसके सापेक्ष निर्देश तंत्र S’, v वेग से x- दिशा में गतिशील है t1 तथा t2 समयों पर प्रेक्षित होती है। इनकी स्थिति समान प्रेक्षित नहीं होगी।
हिंदी माध्यम नोट्स
Class 6
Hindi social science science maths English
Class 7
Hindi social science science maths English
Class 8
Hindi social science science maths English
Class 9
Hindi social science science Maths English
Class 10
Hindi Social science science Maths English
Class 11
Hindi sociology physics physical education maths english economics geography History
chemistry business studies biology accountancy political science
Class 12
Hindi physics physical education maths english economics
chemistry business studies biology accountancy Political science History sociology
English medium Notes
Class 6
Hindi social science science maths English
Class 7
Hindi social science science maths English
Class 8
Hindi social science science maths English
Class 9
Hindi social science science Maths English
Class 10
Hindi Social science science Maths English
Class 11
Hindi physics physical education maths entrepreneurship english economics
chemistry business studies biology accountancy
Class 12
Hindi physics physical education maths entrepreneurship english economics